Long time since I've posted anything on this topic. Phase two of onboard integration of copter is complete. Had first flight flight with MkII electronics today.

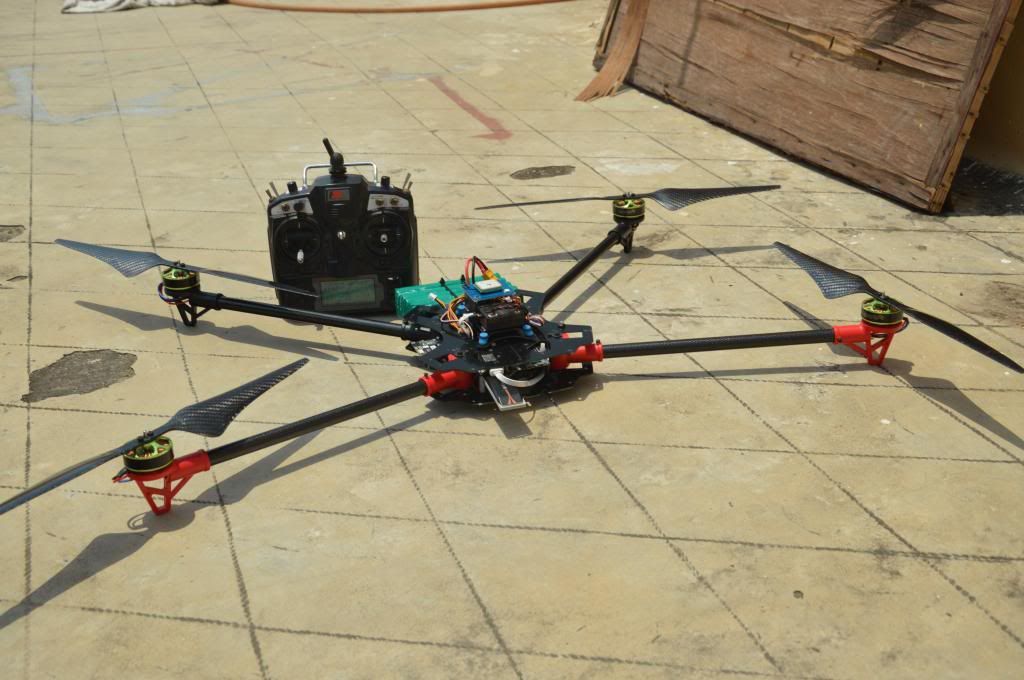
1hr flight XL Quad with DIY brushless gimbal + Linux FC [RCI sweepstakes entry]
Phase I was flying with just APM 2.5 to test out frame, motors, etc. Phase II was integrating most of the new electronics (listed below) and flight testing again. Phase III will be integration of stereo head on front of quad to facilitate SLAM.
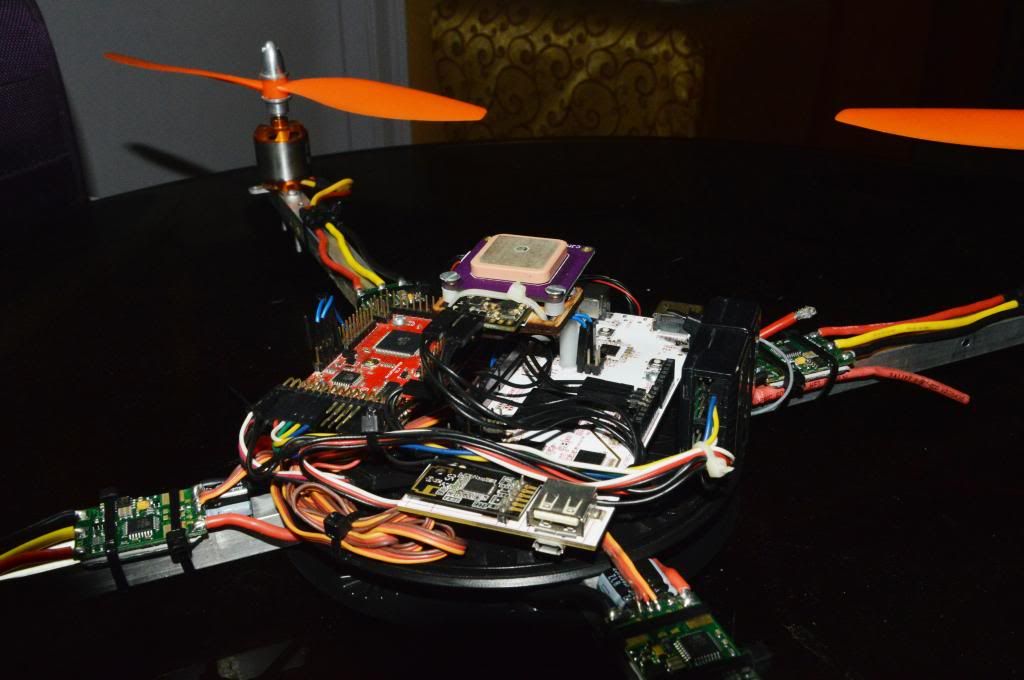
Electronics onboard Mk.I (initial) :APM 2.5
pcDuino
NEO 6M GPS
3DR radio for telemetry

1hr flight XL Quad with DIY brushless gimbal + Linux FC [RCI sweepstakes entry]
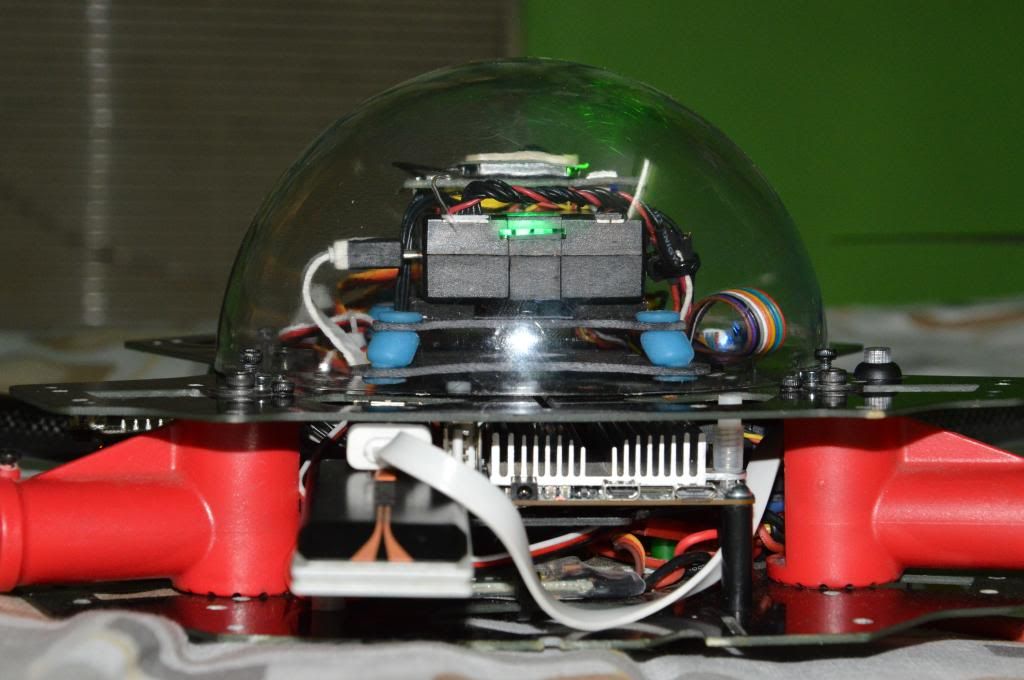
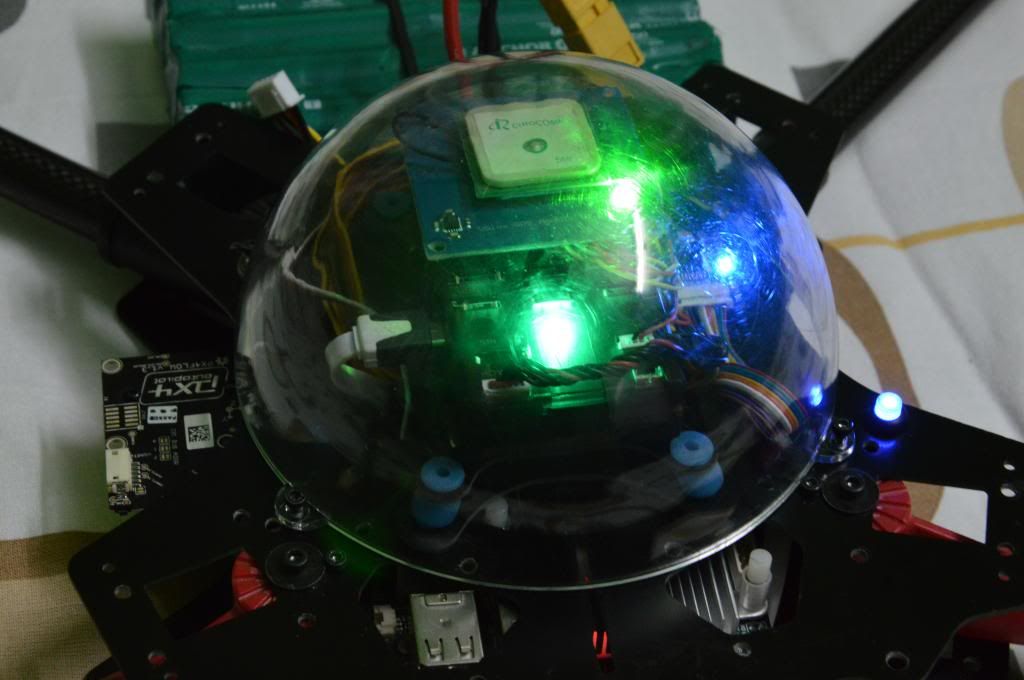
Electronics onboard Mk.II (now) :Pixhawk AP (takes position controller inputs from the Odroid - running PX4
native stack)
Odroid U3 (1.9 Ghz Quad core Exynos 4412 SBC running ROS)
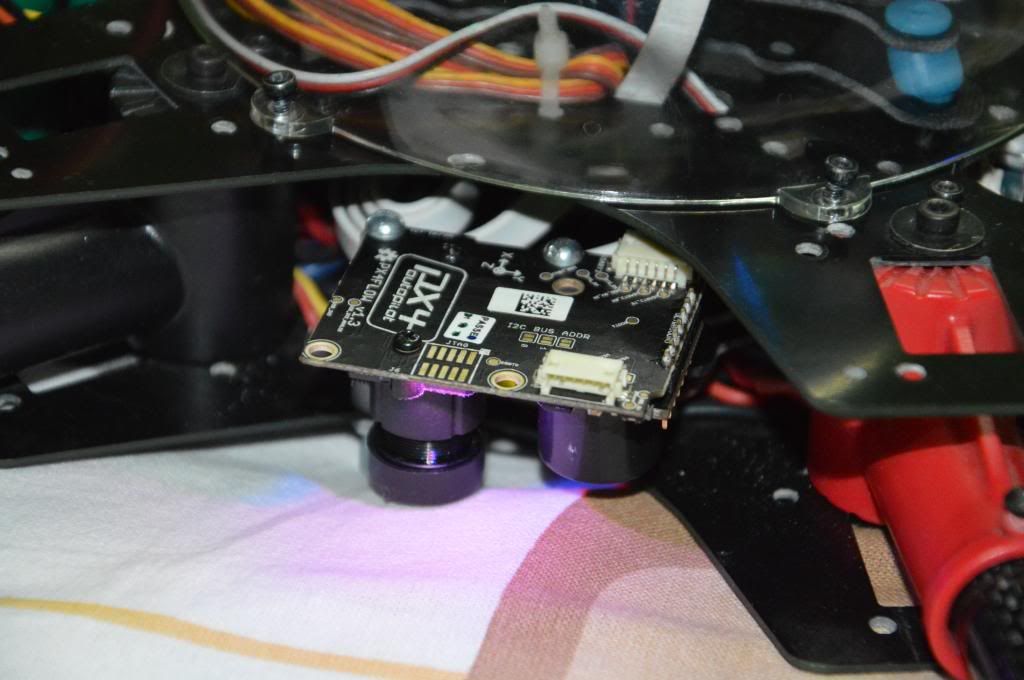
PX4Flow (actively using flow velocity for position hold at low altitudes and
NED relative position estimate)
NEO 6M GPS
DLink DWA150 wireless link
1hr flight XL Quad with DIY brushless gimbal + Linux FC [RCI sweepstakes entry]

1hr flight XL Quad with DIY brushless gimbal + Linux FC [RCI sweepstakes entry]
1hr flight XL Quad with DIY brushless gimbal + Linux FC [RCI sweepstakes entry]
1hr flight XL Quad with DIY brushless gimbal + Linux FC [RCI sweepstakes entry]
1hr flight XL Quad with DIY brushless gimbal + Linux FC [RCI sweepstakes entry]
Electronics onboard Mk.III (next steps) :Mk II hardware with addons VV
Long range Rocket M5 802.11 link
Stereo cam head on front (2 x PS3Eye)
Presently I'm waiting for the two PS3 Eyes, Rocket M5 and a Logitech C920.
Hope you like it

Here is another of my projects : (A sneak peak if you will .... Its Linux

)
1hr flight XL Quad with DIY brushless gimbal + Linux FC [RCI sweepstakes entry]
Kabir




